
【導(dǎo)讀】針對半導(dǎo)體激光二極管由束散角大(14°~46°)導(dǎo)致的激光功率密度在傳播過程中不斷衰減的問題,提出了一種提高激光功率密度的光束整形方法。
首先以X型柱面平凸透鏡和Y型柱面平凸透鏡對激光二極管輸出光束慢軸和快軸方向進(jìn)行準(zhǔn)直,然后通過一對平凸透鏡組合進(jìn)行擴(kuò)束,進(jìn)一步提高光束平行度,最后由單片平凸透鏡將光束聚焦為高功率密度的光點(diǎn)。采用Light Tools軟件仿真光路、優(yōu)化光學(xué)元件參數(shù),對光學(xué)元件進(jìn)行實(shí)際選型后安裝并調(diào)試光束整形系統(tǒng)。測試結(jié)果表明:半導(dǎo)體激光二極管輸出光束的67%激光能量匯聚于直徑1mm圓內(nèi),激光功率密度優(yōu)于30W/cm2。
0 引言
半導(dǎo)體激光二極管(LD)出射光線單色性好、功率高、結(jié)構(gòu)簡單、重量輕,被應(yīng)用于軍事、工業(yè)制造以及航天航空等領(lǐng)域。LD出射光束光軸不對稱且存在束散角,橫截面光強(qiáng)分布滿足高斯分布,需對輸出光束進(jìn)行整形。
LD光束整形技術(shù)根據(jù)光線傳播方式主要分為三類:折射法、反射法、衍射法。折射法通過調(diào)節(jié)透鏡曲率半徑改變折射光束與入射光束的夾角實(shí)現(xiàn)光束整形。赫瑞瓦特大學(xué)Howard J Baker采用單透鏡對光束進(jìn)行整形,將單透鏡表面加工為曲面形狀。經(jīng)單透鏡折射,出射光束橫截面形狀成為正方形或長條形,該方法適用于高強(qiáng)度的現(xiàn)代光纖激光器。反射整形法借助全反射光學(xué)元件對光束在快軸、慢軸方向上的寬度進(jìn)行調(diào)整。南安普頓大學(xué)光電研究中心Clarkson等人提出采用兩個高反平面鏡實(shí)現(xiàn)快、慢兩個方向光束質(zhì)量因子的均衡,將光束按照鏡間錯位距離分割、分段重排。然而,該方法使得光束在整形器中傳播時相鄰光束會發(fā)生部分重疊,對亮度提高有限制。衍射整形法可實(shí)現(xiàn)光束能量的均勻分布,具備更大的自由度,二元光學(xué)元件設(shè)計靈活、對波前控制更為精確。中國科學(xué)院長春光學(xué)精密機(jī)械與物理研究所劉華使用衍射光學(xué)元件調(diào)制光束的振幅和相位,對單片折射透鏡進(jìn)行離子刻蝕,使之成為折衍混合元件,實(shí)現(xiàn)光束的整形和聚焦。
光束整形技術(shù)改變激光束散角,使光束具備準(zhǔn)直特征。然而在工業(yè)制造或科學(xué)研究如晶圓激光切割、激光打孔、激光增材制造、物質(zhì)受激輻射研究中,需要對整形光束進(jìn)一步聚焦,使激光功率密度提高至每平方厘米幾十甚至上百瓦。
反射和衍射方法存在加工周期長、成本高、系統(tǒng)結(jié)構(gòu)復(fù)雜、裝調(diào)精度難以控制等問題,而折射整形光學(xué)元件光能轉(zhuǎn)換效率高、結(jié)構(gòu)簡單。因此,文中基于折射法設(shè)計了先準(zhǔn)直、擴(kuò)束、再聚焦的提高光束功率密度的方法,并搭建實(shí)際光學(xué)系統(tǒng)進(jìn)行驗(yàn)證。
1 LD光束特性及質(zhì)量評價
1.1 LD光束特性
LD出射光束為高斯光束,其腰斑半徑在光軸方向總大于一個最小值,該最小值被稱為束腰半徑ω0,將其對應(yīng)的位置z=0定義為束腰位置。
高斯光束波前的曲率半徑在z軸方向上的分布滿足:
對于給定波長λ的LD,其腰斑半徑在z軸方向上的分布滿足:

此時光束包絡(luò)線近似為斜率的直線,其與z軸的夾角θ=λ/πω0為LD的束散角。
LD光束橫截面示意圖如圖1所示,光束在快軸(垂直于結(jié)平面)和慢軸(平行于結(jié)平面)方向以不同束散角出射,其橫截面近似為橢圓形。

圖1 激光二極管出射光束橫截面形狀
光束沿傳播方向上的強(qiáng)度分布可表示為:
式中:I0為z軸上光強(qiáng);θx和θy分別是光束與x-z面和y-z面夾角;αx和αy分別為x和y方向上高斯強(qiáng)度1/e2點(diǎn)的遠(yuǎn)場束散角;Gx和Gy分別是x和y方向上的“超級高斯因子”,其值為1時,是典型的高斯分布。對于實(shí)際LD,其快軸和慢軸方向上的超高斯因子Gx和Gy均大于1,表征實(shí)際輸出的激光束中除基模外還包含其他的高階模分量。
1.2 光束質(zhì)量評價
斯光束的束散角與束腰半徑的乘積即光參量乘積Bpp,滿足:
式中:Bpp在光學(xué)成像系統(tǒng)中為不變量,光束的束腰寬度ω0與束散角θ為反比關(guān)系。
國際標(biāo)準(zhǔn)組織(ISO)采納光束質(zhì)量因子M2作為光束質(zhì)量評價方法,即:

式中:Bpp為實(shí)際光參量乘積;Bpp00為高斯光參量乘積;光束質(zhì)量因子M2表征實(shí)際光束相比衍射極限(基模高斯光束)的倍數(shù),將基模高斯光束的束散角θ0=4λ/πω0及公式(4)代入公式(6),則可得:

式中:基模光束的束腰寬度ω0由LD的P-N結(jié)物理結(jié)構(gòu)決定;θ對應(yīng)實(shí)際光束的束散角。實(shí)際的LD輸出為多模激光束,包含更多的高階模分量,為提高其光束質(zhì)量因子M2,文中通過透鏡增大光束的束腰寬度,減小束散角θ,同時在腰斑最小位置放置光闌濾除部分高階模分量。
2 提高功率密度的光束整形系統(tǒng)設(shè)計與仿真
2.1 光束整形系統(tǒng)原理框圖
根據(jù)LD光束特性以及光束評價質(zhì)量標(biāo)準(zhǔn),采用圖2所示的步驟提高功率密度的光束整形。

圖2 光束整形系統(tǒng)原理框圖
2.2 激光準(zhǔn)直單元設(shè)計
由公式(1)可知,在瑞利距離處,高斯光束的腰斑半徑為束腰半徑的√2倍,實(shí)際使用中認(rèn)為高斯光束在瑞利距離內(nèi)可看作近似平行光,也稱瑞利距離為準(zhǔn)直距離,因此通過透鏡變換增加高斯光束的束腰半徑,可以獲得較長的準(zhǔn)直距離。
由于LD出射光束為橢圓形狀,文中提出一種X型柱面平凸透鏡結(jié)合Y型柱面平凸透鏡的方式進(jìn)行準(zhǔn)直。如圖3所示,首先對慢軸光束進(jìn)行準(zhǔn)直,光束橫截面形狀長寬比值為z軸坐標(biāo)值的函數(shù),在光斑長寬比最接近1的坐標(biāo)處放置快軸準(zhǔn)直透鏡,使準(zhǔn)直后的光束能量均勻分布于光學(xué)元件中心。
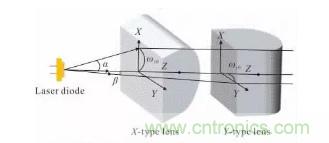
圖3 柱面透鏡對LD光束準(zhǔn)直示意圖
設(shè)圖3中X型柱面鏡為薄透鏡,焦距為fx,且焦點(diǎn)位于LD高斯光束的束腰位置,由公式(1)、(2)可得,在透鏡處的入射光束波前曲率半徑及腰斑半徑為:
又由透鏡對球面波(柱面波)的變換公式:

可得到經(jīng)過X型柱面鏡準(zhǔn)直后的出射光束的束腰半徑、束腰位置及束散角:
同理,對于Y型柱面鏡,可得準(zhǔn)直后的出射光束的束腰半徑、位置及束散角:
由此可知對于柱面準(zhǔn)直透鏡,焦距f越大,準(zhǔn)直后的出射光束束腰半徑越大且束散角越小。為實(shí)現(xiàn)光束的進(jìn)一步整形,應(yīng)使得快軸、慢軸方向的光束在準(zhǔn)直后束腰半徑、束散角盡可能相近,由公式(10)、(11)可得X、Y型柱面鏡的焦距關(guān)系需滿足:
同時要使X、Y方向準(zhǔn)直后的出射光束束腰位置也盡可能接近,應(yīng)滿足:

由公式(4)可知,透鏡焦距f越大,準(zhǔn)直后出射光束的束散角越小,但同時入射光束在透鏡處的腰斑半徑越大,這使得透鏡的直徑和厚度增大,不再滿足薄透鏡假設(shè),導(dǎo)致出射光束的球差增加,降低光束質(zhì)量。文中根據(jù)經(jīng)驗(yàn)公式設(shè)置柱面鏡焦距和直徑,如柱面鏡高度可取為20~25mm、透鏡直徑的85%為光束有效準(zhǔn)直范圍等。
2.3 激光擴(kuò)束單元設(shè)計
準(zhǔn)直單元改善光束的長寬比和平行度,但柱面透鏡尺寸較小,導(dǎo)致準(zhǔn)直光束腰斑較小。根據(jù)2.1節(jié)光參乘積不變原理可知,準(zhǔn)直光束仍存在束散角,為進(jìn)一步壓縮準(zhǔn)直光束的束散角,文中在準(zhǔn)直單元后引入激光擴(kuò)束單元。
激光擴(kuò)束鏡按照組合透鏡類型分為兩種:開普勒式擴(kuò)束鏡和伽利略式擴(kuò)束鏡。如圖4(a)所示,開普勒式擴(kuò)束鏡由一片輸入正透鏡和一片輸出正透鏡以共焦形式組合而成。如圖4(b)所示,伽利略式擴(kuò)束鏡由一片輸入負(fù)透鏡和一片輸出正透鏡以虛共焦形式組合而成,輸入透鏡將虛焦點(diǎn)光束傳遞給輸出透鏡。
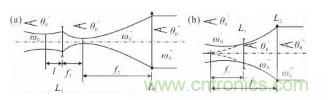
圖4(a)開普勒式擴(kuò)束鏡;(b)伽利略式擴(kuò)束鏡
對比兩種擴(kuò)束鏡共焦方式:在開普勒式擴(kuò)束鏡的焦點(diǎn)處增加針孔光闌,可濾除外界雜散光并截取光場能量的均勻部分,同時濾除LD光束中部分高階模分量,提高光束質(zhì)量因子M2,而伽利略式擴(kuò)束鏡的虛共焦方式導(dǎo)致其無法實(shí)現(xiàn)該效果。因此,文中選擇開普勒式擴(kuò)束鏡進(jìn)行激光擴(kuò)束,如圖4(a)所示,柱面組合透鏡出射的準(zhǔn)直光束以束散角θ0′、束腰半徑ω0′輸入擴(kuò)束單元,束腰位置與輸入透鏡L1距離為l1,此時f1<<l1,由公式(8)可得L1的輸出光束為:
輸出透鏡L2的焦距為f2,其焦點(diǎn)位于ω0″處,由公式(8)可知,擴(kuò)束單元輸出光束的束腰半徑及位置為:
開普勒式擴(kuò)束鏡對光束的擴(kuò)束倍率為:
式中:M=f2/f1;θ0′為入射光束發(fā)散角;θ0′′′為出射光束發(fā)散角;ω(l)為L1前表面光斑半徑。
2.4 激光聚焦單元
對激光束進(jìn)行聚焦可在焦點(diǎn)位置得到高斯光束的最小腰斑,提高光束的功率密度。
對于給定的聚焦透鏡L3,設(shè)其焦距為f3,由公式(8)可得:
此時若滿足πω0′′′′2/λ>>f3,且l3>>f3,則可使用焦距較短的透鏡進(jìn)行聚焦,在距離擴(kuò)束單元出射光束束腰位置較遠(yuǎn)的位置處,公式(17)可近似為:
將公式(18)代入激光功率密度公式:
即可求得整形后的激光功率密度。文中根據(jù)期望達(dá)到的功率密度范圍,逆向?qū)劢箚卧?、擴(kuò)束單元和準(zhǔn)直單元進(jìn)行仿真和優(yōu)化。
2.5 光束整形系統(tǒng)仿真及其結(jié)果
采用Light Tools軟件對光束整形系統(tǒng)進(jìn)行仿真,以日亞NDB7K75型激光二極管為例,根據(jù)表1參數(shù)設(shè)置LD光源中心波長448nm,光束慢軸和快軸方向束散角分別為14°、46°,并根據(jù)實(shí)際功率需要設(shè)置光源出射功率為376mW。

表1 NDB7K75激光二極管參數(shù)
仿真時使用SIGMA KOKI公司生產(chǎn)的透鏡,表2列出了透鏡的參數(shù),其中f為焦距,r為曲率半徑,A×B為柱面透鏡長×寬,D為球面透鏡直徑,te為透鏡邊緣厚度,tc為透鏡中心厚度。

表2 透鏡參數(shù)(參考波長546.1nm)
平凸透鏡無限遠(yuǎn)共軛成像具有如下特點(diǎn):(1)用于聚焦光線時,平行光從凸面一側(cè)入射,球差較小,成像更清晰,即焦點(diǎn)光斑較?。唬?)把點(diǎn)光源變成平行光時,光線由平面一側(cè)入射可得到更高平行度出射光線。依據(jù)以上成像特點(diǎn)設(shè)定光路中各平凸透鏡放置方向。
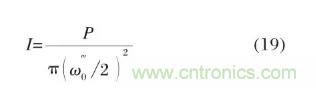
調(diào)用仿真軟件內(nèi)部聚焦、準(zhǔn)直評價函數(shù),將光學(xué)元件的坐標(biāo)值添加為優(yōu)化變量進(jìn)行優(yōu)化,結(jié)果如圖5所示,其中的黑色實(shí)線代表光線追跡效果,Lx和Ly透鏡分別為慢軸準(zhǔn)直透鏡和快軸準(zhǔn)直透鏡,二者組成準(zhǔn)直單元,L1和L2組合為擴(kuò)束單元,L3為聚焦透鏡。
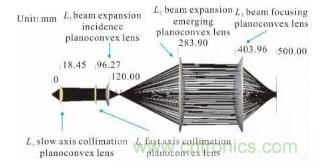
圖5 光學(xué)系統(tǒng)空間坐標(biāo)及光線追跡
圖6和圖7分別為LD光束經(jīng)擴(kuò)束單元擴(kuò)束后在距離光源50cm和2500cm處的橫截面功率分布,光斑半徑分別為41、47cm,小于√2倍束腰半徑,處于瑞利距離,說明光束平行度得到進(jìn)一步提高。如圖8所示,光束整形系統(tǒng)將LD光束功率匯聚于透鏡焦點(diǎn)處4mm直徑腰斑,說明激光功率密度得到提高。
圖6 擴(kuò)束鏡出射光束在距離LD光源50cm處功率密度分布
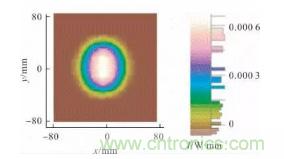
圖7 擴(kuò)束鏡出射光束在距離LD光源2500cm處功率密度分布

圖8 光束在匯聚透鏡焦點(diǎn)處功率密度分布
3 光束整形系統(tǒng)
實(shí)驗(yàn)根據(jù)仿真優(yōu)化的光學(xué)元件間距,搭建光路平臺進(jìn)行實(shí)物驗(yàn)證,如圖9所示,從左至右依次為LD驅(qū)動電源(通過調(diào)節(jié)驅(qū)動電壓可連續(xù)調(diào)節(jié)激光二極管輸出功率)、LD、慢軸準(zhǔn)直柱面透鏡、快軸準(zhǔn)直柱面透鏡、擴(kuò)束單元入射透鏡、擴(kuò)束單元出射透鏡及聚焦透鏡。
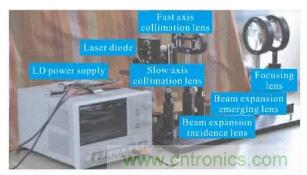
圖9激光二極管光束整形系統(tǒng)
LD如圖10(a)所示,其安裝了散熱銅柱并固定在俯仰角、方位角可調(diào)的夾持器上(見圖10(b))。

圖10 (a)半導(dǎo)體激光二極管;(b)裝配散熱銅柱及可調(diào)底座
圖11(a)、(b)分別為LD出射光束經(jīng)過擴(kuò)束單元后在50、2500cm處的光斑形狀,說明LD光束經(jīng)過擴(kuò)束后,平行度得到改善。
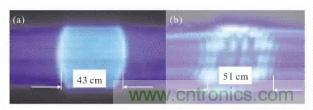
圖11 LD光束經(jīng)準(zhǔn)直及擴(kuò)束后在(a)50cm和(b)2500cm處光斑形狀
實(shí)驗(yàn)時,對LD加載4.0V的偏置電壓,使用激光功率計測量LD的輸出功率為376mW。為獲得光束整形后的功率密度,以光斑中心為圓心,測量不同直徑圓內(nèi)多個點(diǎn)的激光功率并取平均值,通過差分計算出相鄰?fù)膱A所形成的圓環(huán)內(nèi)激光功率及圓環(huán)面積,二者求比值,得到不同圓環(huán)內(nèi)的平均激光功率密度。文中測量的光斑直徑為1.00、1.25、1.50、1.75、2.00、2.25、2.50mm。圖12橙線為平均激光功率密度離散值所繪制的折線圖,其趨勢表明光斑半徑越大,激光功率密度越小。藍(lán)線為擬合離散數(shù)據(jù),為高斯曲線,近似代表聚焦透鏡焦點(diǎn)處光斑功率密度的整體分布。圖13是不同光斑直徑下激光功率仿真結(jié)果(藍(lán)色曲線)與實(shí)驗(yàn)結(jié)果(藍(lán)色折線)的對比,實(shí)驗(yàn)結(jié)果與仿真結(jié)果基本吻合。紅色折線為不同直徑光斑內(nèi)激光功率同二極管輸出總功率之比。由圖13可知,1mm直徑圓內(nèi)激光功率為252mW,約占LD出射光束總功率的67%。說明光束整形系統(tǒng)在實(shí)現(xiàn)提高激光功率密度的同時具備較高的功率傳輸效率。
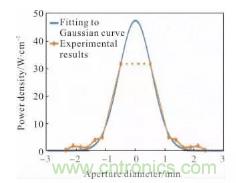
圖12 光束功率密度離散點(diǎn)擬合為高斯曲線

圖13 激光功率同光斑直徑函數(shù)關(guān)系
4 結(jié)論
提出并實(shí)驗(yàn)驗(yàn)證了一種提高激光功率密度的光束整形方法,使用準(zhǔn)直、擴(kuò)束及聚焦單元的設(shè)計思路,成功地將半導(dǎo)體激光二極管67%的能量匯聚于直徑1mm的圓內(nèi),激光功率密度優(yōu)于30W/cm2。這說明文中設(shè)計的LD光學(xué)整形系統(tǒng)功率傳輸效率高,采用分立光學(xué)元件實(shí)現(xiàn)的光束整形系統(tǒng)結(jié)構(gòu)簡單、易于搭建,具有較高的應(yīng)用價值。
本文內(nèi)容轉(zhuǎn)載自《紅外與激光工程》2019年第8期,版權(quán)歸《紅外與激光工程》所有。
辛光澤,陳東啟,蔡毅,白廷柱,王嶺雪
北京理工大學(xué)光電學(xué)院納米光子學(xué)與超精密光電系統(tǒng)北京市重點(diǎn)實(shí)驗(yàn)室



