
【導(dǎo)讀】人工智能 (AI) 正在從根本上改變機(jī)器視覺和成像應(yīng)用的功能。AI 使高分辨率成像數(shù)據(jù)實(shí)時分析的精度和靈敏度變得更高,并且能夠快速檢測模式或異常。這些功能正在為機(jī)器人輔助外科手術(shù)、基于 3D 成像的安全和監(jiān)控平臺以及工廠自動化環(huán)境中基于視覺的工業(yè)機(jī)器人提供幫助。
隨著傳感器技術(shù)的進(jìn)步以及采用微型模塊化封裝的超高清或 4K 視頻圖像傳感器的實(shí)現(xiàn),這種向基于 AI 處理的轉(zhuǎn)變成為可能。
機(jī)器人輔助內(nèi)窺鏡平臺和機(jī)器視覺攝像機(jī)等應(yīng)用需要傳輸來自安裝在極小的探針尖端上的傳感器的高分辨率圖像數(shù)據(jù),而該探針尖端通過極細(xì)的電纜與視頻采集和分析系統(tǒng)相連。來自視頻采集系統(tǒng)的控制信息同時流回到探針尖端,從而提供了一種通過傾斜和縮放等控制手段來控制探針尖端位置的方法。
圖1展示了工業(yè)移動機(jī)器人這類基于視覺的控制系統(tǒng),它們需要極低的延遲,以實(shí)現(xiàn)對高精度視頻數(shù)據(jù)的實(shí)時采集和分析。通過反向路徑傳輸控制信號以調(diào)整攝像機(jī)位置的過程也同樣需要低延遲。電纜和導(dǎo)體的數(shù)量、導(dǎo)體的尺寸以及傳感器端的功率耗散可能是空間受限應(yīng)用(如內(nèi)窺鏡和機(jī)器視覺)的重要限制因素。

圖1. 基于視覺的控制系統(tǒng)——工業(yè)移動機(jī)器人
許多現(xiàn)有的高速接口技術(shù)可以幫助實(shí)現(xiàn)高分辨率視頻數(shù)據(jù)的可靠傳輸,但基于視覺的控制系統(tǒng)也存在缺點(diǎn)。例如,由于與協(xié)議相關(guān)的開銷,以太網(wǎng)等標(biāo)準(zhǔn)技術(shù)會產(chǎn)生額外的延遲。由于以太網(wǎng)物理層設(shè)備無法直接連接到傳感器的本地視頻接口,因此這些設(shè)備還需要額外的導(dǎo)線和元件(如晶體振蕩器)。例如,一個 4MP、30fps 的高分辨率成像儀可以生成大約 3.2Gbps 的視頻數(shù)據(jù)。單個基于千兆位的以太網(wǎng)鏈路(例如 1000-BaseT)無法提供足夠的吞吐量來承載這種未經(jīng)壓縮的高分辨率數(shù)據(jù),這會在圖像流中引入偽影,進(jìn)而可能在基于機(jī)器視覺的視頻處理中導(dǎo)致錯誤。
專用串行器/解串器 (SerDes) 技術(shù)(如 V3Link TSER953 串行器以及 TDES954 和 TDES960 解串器)協(xié)同工作,通過單根超細(xì)導(dǎo)線同時傳輸高分辨率視頻、控制信號和電力。這些器件有助于在傳感器和處理器之間建立鏈路,以聚合時鐘、未壓縮的視頻、控制、電力和通用輸入/輸出信號,如圖 2 所示。
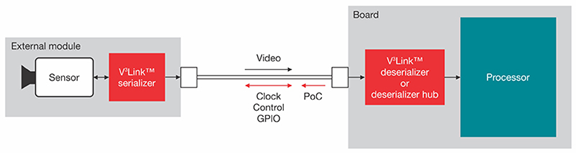
圖 2:使用 V3Link 器件進(jìn)行數(shù)據(jù)串行化、解串化和電力傳輸?shù)氖疽鈭D
在該配置中,信號和電力通過正向通道傳輸,該通道從位于傳感器模塊中的串行器通往位于傳感器融合分析系統(tǒng)中的解串器或解串器集線器,同時,該通道還能傳輸控制信號和電力。
V3Link 解串器還為所有連接的串行器提供嵌入式時鐘,從而實(shí)現(xiàn)跨多個傳感器的視頻同步,支持視頻拼接、圖像混合、立體視覺的 3D 重建和深度感應(yīng)。使用 TDES960 內(nèi)部生成的幀同步信號,您可以同步多個攝像機(jī)并實(shí)現(xiàn) 600ns 的精度,進(jìn)而實(shí)現(xiàn)多個需要時間觸發(fā)的機(jī)器視覺應(yīng)用。通過從反向通道中提取參考時鐘實(shí)現(xiàn)主時鐘同步,還能消除由為多個成像儀充當(dāng)時鐘的不同振蕩器的相對漂移引起的同步誤差。
用于減少信號損失和降低功耗的自適應(yīng)均衡器技術(shù)
除了支持視頻數(shù)據(jù)、控制信號和電力的單線傳輸之外,V3Link 器件還包含自適應(yīng)均衡器技術(shù),在 2.1GHz 頻率下可補(bǔ)償高達(dá) 21dB 的損耗,從而支持使用極細(xì)的 28 至 32 美國線規(guī) (AWG) 電纜。AWG 編號數(shù)字越大,電纜越細(xì),信號損耗也越高。
較細(xì)的電纜更加靈活,可以支持傳感器在狹窄、空間受限的環(huán)境(如內(nèi)窺鏡)中定位的應(yīng)用。在同一根細(xì)電纜上傳輸電力和控制信號的功能也可以最大限度地減少導(dǎo)體的數(shù)量。
在傳感器端 250mW 的典型功耗下,V3Link 串行器消耗的功率非常低,能夠?qū)鞲衅骱痛衅骷傻椒浅>o湊的區(qū)域中,沒有功耗且不會發(fā)熱,從而不需要額外的空間。借助 V3Link 產(chǎn)品的專有主時鐘同步技術(shù),傳感器端無需使用晶振或任何振蕩器,這進(jìn)一步降低了成本和總體空間要求。
結(jié)語
從醫(yī)學(xué)成像應(yīng)用到機(jī)器視覺攝像機(jī),AI 正在推動對實(shí)時視頻采集、傳輸和分析的需求。V3Link SerDes IC 可幫助工程師滿足這些需求,同時減少電纜數(shù)量并降低功耗和整體系統(tǒng)成本。V3Link 器件提供通用鏈路技術(shù),非常適合大多數(shù)需要實(shí)時采集、傳輸和分析高分辨率視頻數(shù)據(jù)的應(yīng)用。這些器件支持各種布線配置(如同軸電纜、非屏蔽雙絞線和屏蔽雙絞線)以及多種時鐘模式(如同步和異步)。
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請聯(lián)系小編進(jìn)行處理。
推薦閱讀:


