
【導(dǎo)讀】針對5G 毫米波通信系統(tǒng)對本振源頻率、相位噪聲、雜散抑制要求的提升,提出了一種結(jié)合ADF4002 和2 個ADF5355 頻率合成器芯片,可同時用于中頻和射頻電路的高性能本振源。該本振源為系統(tǒng)中頻模塊提供5.4 GHz 的單音本振信號并且利用數(shù)控衰減器和放大器實(shí)現(xiàn)了輸出功率可調(diào),同時也利用ADF5355 的鎖相環(huán)(PLL)和倍頻器為射頻模塊提供8.4~11.2 GHz 寬頻帶寬、步進(jìn)為100 MHz 的可調(diào)頻本振信號,最終通過硬件電路的設(shè)計與調(diào)試,以及單片機(jī)(SCM)控制程序的編寫,實(shí)現(xiàn)了低相噪、低雜散的穩(wěn)定頻率源。
在5G 毫米波通信系統(tǒng)中,大規(guī)模多輸入多輸出(MIMO)技術(shù)被用來大幅度提高數(shù)據(jù)傳輸速率和信道容量。大規(guī)模MIMO 技術(shù)也是5G區(qū)別于現(xiàn)有系統(tǒng)的核心技術(shù)之一[1]。在大規(guī)模MIMO 場景下,通過基站配置數(shù)百根天線,可以使大量的終端用戶使用同一個時頻資源,因此系統(tǒng)中同時存在多路射頻收發(fā)信道,也就需要多路本振信號。本振的研究是毫米波通信系統(tǒng)研究的關(guān)鍵之一[2]。
本振模塊與收發(fā)系統(tǒng)相互獨(dú)立可以有效地抑制本振泄露和射頻串?dāng)_等問題,減少收發(fā)系統(tǒng)印制電路板(PCB)版的面積,并且可以使每個模塊更靈活,便于調(diào)試和后期維護(hù)。綜合考慮系統(tǒng)性能和成本等方面的因素,采用外置本振是現(xiàn)代移動通信系統(tǒng)中常見的選擇[2-3]。
1、本振系統(tǒng)設(shè)計
頻率合成技術(shù)主要分為直接合成技術(shù)與間接合成技術(shù)。直接合成技術(shù)又包括直接模擬合成技術(shù)與直接數(shù)字合成技術(shù)(DDS)。直接模擬合成技術(shù)是最早期的頻率合成技術(shù),其通過一系列的模擬器件進(jìn)行倍頻、混頻、分頻等算術(shù)運(yùn)算從而合成固定頻率,再利用窄帶濾波器濾出所需頻率。在這種方式下參考信號的相位噪聲直接決定了輸出信號的相噪,因此容易獲得相噪很低的輸出信號,但是這種電路的實(shí)現(xiàn)需要大量的模擬器件組合,集成度低,體積大,雜散抑制較差,成本高昂,目前該種技術(shù)主要用于射頻微波測試測量儀器中。
直接數(shù)字合成技術(shù)的特點(diǎn)是通過數(shù)字方式累加相位,再利用相位和去查詢正弦函數(shù)表從而得到正弦波的離散數(shù)字系列,最終經(jīng)過數(shù)模(D/A)轉(zhuǎn)換得到模擬正弦波。DDS 具有頻點(diǎn)轉(zhuǎn)換速率快、頻率分辨率高的優(yōu)點(diǎn),不過由于輸出頻率雜散很多,輸出頻率較低,使其使用范圍受限[4]。
間接頻率合成技術(shù)即為鎖相環(huán)式頻率合成技術(shù)(PLL),它主要是通過相位負(fù)反饋的方式來實(shí)現(xiàn)對兩路信號相位的跟蹤,從而用鎖相環(huán)將壓控振蕩器(VCO)的頻率鎖定在所需要的頻點(diǎn)上。該種形式結(jié)構(gòu)簡單,相位噪聲低,雜散抑制較好,成本較低,但是頻率轉(zhuǎn)換的時間長,頻率分辨率比較低[5-6]。
結(jié)合本設(shè)計中需要輸出兩路頻率較高的本振信號,并且其中一路帶寬較寬的特點(diǎn),綜合相位噪聲、雜散抑制等因素,決定采用鎖相環(huán)頻率合成技術(shù)來實(shí)現(xiàn)該本振源。
1.1 整體框架
圖1 是PLL 的基本結(jié)構(gòu),鎖相環(huán)電路的組成部分主要包括壓控振蕩器(VCO)、鑒相器(PD)、環(huán)路濾波器(LPF)和分頻器[5]。
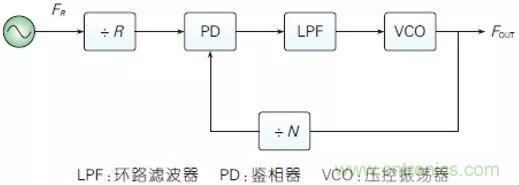
圖1、PLL 結(jié)構(gòu)框圖
參考源給出的輸入信號FR 通過R 分頻器降低為鑒相器的檢測頻率FPD ,而VCO 的輸出頻率經(jīng)過N 分頻器后得到輸入鑒相器的另一路信號FN ,兩路信號通過鑒相器進(jìn)行相位比較,它們產(chǎn)生的相位差轉(zhuǎn)換為電壓或電流,經(jīng)過低通的環(huán)路濾波器(LPF)濾除噪聲和高頻分量后送入VCO 用來控制VCO 的輸出頻率。當(dāng)鎖相環(huán)穩(wěn)定后,即FPD 和FN 同頻同相的狀態(tài)下,鎖相環(huán)的輸出頻率為:
相位噪聲是衡量本振源的重要指標(biāo),收發(fā)信機(jī)的調(diào)制與解調(diào)精度(EVM)受系統(tǒng)的相位噪聲影響,若相位噪聲過大,則系統(tǒng)解調(diào)出的星座圖會出現(xiàn)旋轉(zhuǎn),因此首先要降低本振源的相位噪聲。影響相位噪聲的因素有很多,在近端,相位噪聲主要取決于參考信號、N 分頻器、鑒相器以及電源。通過式(2)可以估算出環(huán)路帶寬內(nèi)的相位噪聲:
PN = PNfloor + 10log(N) + 10log( fvco )(2)
在輸出頻率不變的情況下,降低分頻比N 可以改善相位噪聲。一般來說,本振系統(tǒng)的參考源是全球定位系統(tǒng)(GPS)下行的10 MHz[5]。由于在此設(shè)計中需要較高的輸出頻率,為了獲得良好的相位噪聲,故選擇提升參考頻率。在整個系統(tǒng)前端先設(shè)計一個鎖相環(huán)電路,將10 MHz 參考信號提高至100 MHz。由式(2)可知:系統(tǒng)的相位噪聲將會降低10 dB;而在環(huán)路帶寬外,相位噪聲主要受VCO 影響。為了得到更好的頻率穩(wěn)定度和相位噪聲,本設(shè)計中用100 MHz 的恒溫晶體振蕩器(OCXO)代替VCO[6]。
由于兩路本振信號在系統(tǒng)中被同時使用,為了保證信號的一致性,需要采用同一個參考源,圖2 為本振源結(jié)構(gòu)框圖。ADI 公司的頻率合成器ADF4002,結(jié)合外部恒溫晶振XO5051 以及GPS 參考源10 MHz,并且組成PLL 頻率合成器。該模塊輸出100 MHz 的信號經(jīng)過集總元件組成的功分器后分成2 路,分別作為2個ADF5355 的參考頻率,ADF5355 是集成VCO 的寬帶頻率合成器。第1路參考信號通過ADF5355 的鎖相環(huán)和倍頻器后輸出8.4~11.2 GHz 的信號,以100 MHz 步進(jìn)可調(diào)的本振信號,然后經(jīng)過濾波器和放大器HMC441 得到最終所需的射頻本振;第2 路100 MHz 參考信號通過另一個ADF5355 的鎖相環(huán)電路并且再輸出5.4 GHz 的信號,再經(jīng)數(shù)字衰減器HMC425A 和放大器GVA_83+,得到所需功率的中頻本振。

圖2、本振源結(jié)構(gòu)框圖
1.2 環(huán)路濾波器設(shè)計
環(huán)路濾波器是鎖相環(huán)電路中的重要組成單元,它可以為VCO 提供干凈穩(wěn)定的調(diào)諧信號,維持環(huán)路穩(wěn)定性,控制環(huán)路帶內(nèi)外噪聲,抑制參考邊帶雜散干擾。環(huán)路濾波器的重要參數(shù)為環(huán)路帶寬和相位裕度。環(huán)路帶寬的減小可以改善雜散的抑制以及VCO 近端的相位噪聲,但同時增加鎖定時間,并導(dǎo)致遠(yuǎn)端相位噪聲的惡化;而環(huán)路帶寬增大則會減少鎖定時間,不過無法保證VCO 近端的雜散和相位噪聲抑制。此外,當(dāng)環(huán)路帶寬為鑒相頻率的1/10 到1/5 時,鎖相環(huán)會失鎖[4-5]。
綜合環(huán)路穩(wěn)定性、雜散抑制、相位噪聲、鎖定時間等因素,最終確定輸出頻率為100 MHz 的鎖相環(huán)環(huán)路帶寬為30 Hz,同時輸出5.4 GHz 以及8.4~11.2 GHz 的PLL 環(huán)路帶寬則為100 kHz。圖3 給出了兩路鎖相環(huán)電路中四階濾波器的結(jié)構(gòu)和取值。
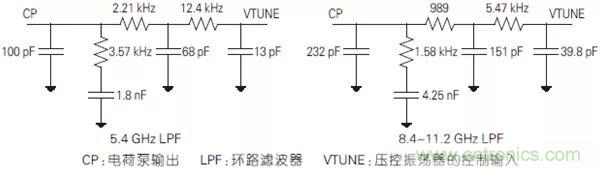
圖3、環(huán)路濾波器結(jié)構(gòu)
1.3 單片機(jī)部分設(shè)計
本設(shè)計中采用單片機(jī)C8051F320對ADF4002、2 個ADF5355 芯片以及數(shù)控衰減器HMC425A 進(jìn)行輸出頻率和功率的控制,其中兩路ADF5355 共用數(shù)據(jù)傳輸和串行時鐘線。圖4 為單片機(jī)控制電路結(jié)構(gòu)圖。
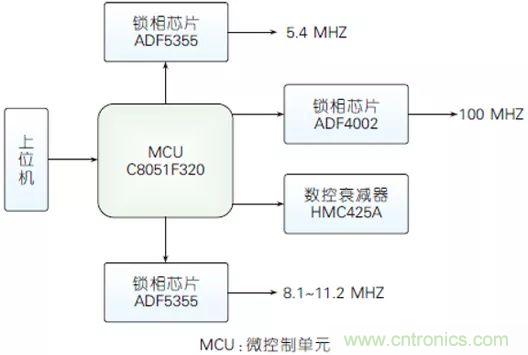
圖4、單片機(jī)控制電路
2、測試結(jié)果與實(shí)物圖
本設(shè)計實(shí)現(xiàn)了兩路不同頻率的本振信號輸出,具有較好的相位噪聲。利用RS 的相位噪聲分析儀分別對兩路輸出信號的相位噪聲進(jìn)行了測量,結(jié)果如圖5、6 所示。在8.4~11.2 GHz 頻帶內(nèi)選擇10 GHz 信號的相位噪聲測試結(jié)果,參考頻率源為相噪儀自帶的10 MHz。
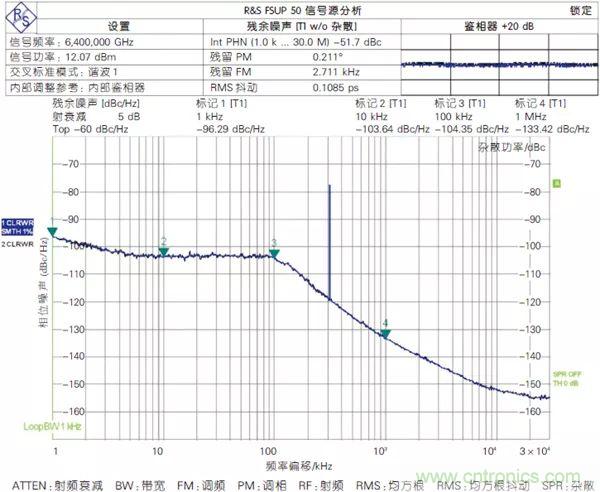
圖5、ADF5355 輸出5.4 GHz 相位噪聲
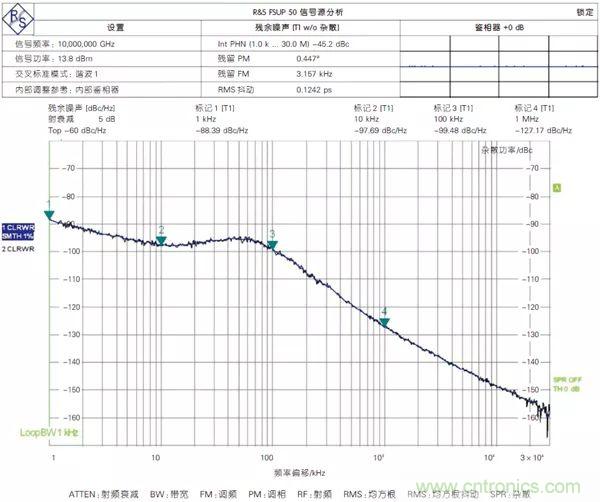
圖6、ADF5355 輸出10 GHz 相位噪聲
從圖5、6 中可以知道:5.4 GHz 信號輸出功率為12.07 dBm,10 GHz的信號輸出功率約為13.8 dBm, 并且兩路ADF5355 鎖相環(huán)電路的輸出信號皆具有良好的相位噪聲,具體結(jié)果如表1所示。通過上位機(jī)進(jìn)行頻率控制,利用相噪儀對頻率范圍為8.4~11.2 GHz,步進(jìn)100 MHz 的本振信號輸出功率進(jìn)行了測試,結(jié)果如圖7 所示。在該頻帶內(nèi)輸出最大功率為14.57 dBm,最小功率為6.7 dBm。值得注意的是:在該頻帶內(nèi)信號輸出功率浮動較大,這主要是由于ADF5355 的輸出功率有8 dBm 的變化范圍。在后續(xù)鏈路設(shè)計中可以結(jié)合數(shù)控衰減器來平衡各個頻點(diǎn)的輸出功率。此外,圖中譜線的不清晰主要是由于上位機(jī)變換頻率的速度大于本振信號鎖定的速度,在實(shí)際應(yīng)用中可以等單個頻點(diǎn)鎖定后,再進(jìn)行頻率切換,以保證本振信號良好的性能。圖8 為本振源實(shí)物圖。
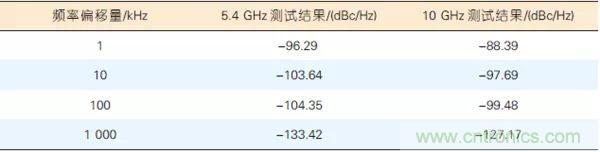
表1、本振源相位噪聲測試結(jié)果
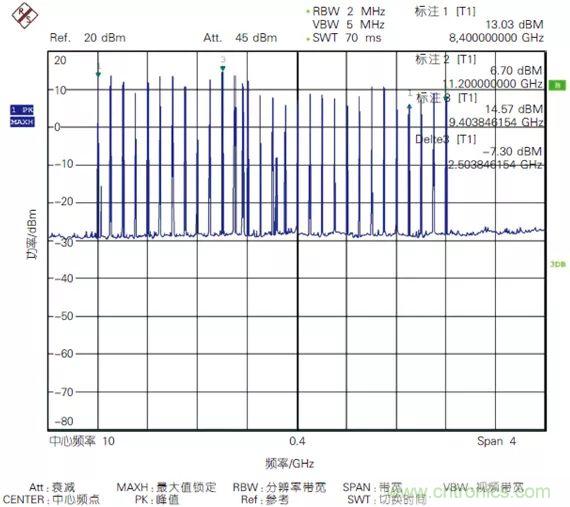
圖7、8.4~11.2 GHz 本振信號輸出功率

圖8、本振系統(tǒng)實(shí)物圖
3、結(jié)束語
文中通過結(jié)合3 個鎖相環(huán)結(jié)構(gòu)成功實(shí)現(xiàn)了參考頻率的提升和2 個不同頻段本振源的輸出,可同時用于中頻以及射頻模塊,并且降低了相位噪聲。輸出的兩路本振信號中,一路5.4 GHz 信號功率可調(diào),另一路8.4~11.2 GHz 信號可實(shí)現(xiàn)較寬頻帶內(nèi)本振源的輸出。在后續(xù)研究中,我們可以通過功分模塊,配合放大器實(shí)現(xiàn)多路同頻同相的本振信號的輸出以滿足大規(guī)模MIMO 系統(tǒng)對于本振的相關(guān)需求。
參考文獻(xiàn)
[1] 尤肖虎.5G 移動通信發(fā)展趨勢與若干關(guān)鍵技術(shù)[J].中國科學(xué),2014,5(44):551-563
[2] 劉兆棟.面向5G 移動通信系統(tǒng)的本振技術(shù)研究[C]//2015 年全國微波毫米波會議論文集.合肥:中國電子學(xué)會,2015
[3] 單月忠.基于ADF4351 的頻率源設(shè)計與實(shí)現(xiàn)[J].無線電通信技術(shù),2014,40(6):85-88
[4] 趙清瀟.基于寬帶多通道微波收發(fā)信機(jī)的本振源設(shè)計與實(shí)現(xiàn)[D].青島:山東大學(xué),2015
[5] 褚穎穎.大規(guī)模MIMO 系統(tǒng)射頻關(guān)鍵技術(shù)研究[D].南京:東南大學(xué),2015
[6] 林波.大規(guī)模MIMO 外部本振的研究[D].南京:東南大學(xué), 2018
[7] 黃維辰.面向下一代移動通信系統(tǒng)的多通道射頻收發(fā)信機(jī)以及頻率源的研究[D].南京:東南大學(xué),2017
[8] BANERJEE D. PLL Performance, Simulation, and Design 5th Edition [M]. USA: National, 2017:3-8
作者:胡蒙筠、周健義,東南大學(xué)
來源:中興通訊技術(shù)
推薦閱讀:


