

【導(dǎo)讀】現(xiàn)階段容量較小電池的純電動(dòng)汽車,有很多用戶反映使用體驗(yàn)很糟糕,那么我們就來討論兩個(gè)與之相關(guān)的議題:電池能量管理(BMS)和荷電狀態(tài)(SOC)的精度,看看這兩個(gè)東西怎樣才能助續(xù)航一臂之力。
一、能量管理

首先,我們考慮一下能量分配,在SOC從整個(gè)100%到零或者說整個(gè)電池能量管理過程可以分解為:上下兩段留存的不可用能量(純電動(dòng)汽車上下留余更多一些)、可用能量、SOC誤差、調(diào)節(jié)電池溫度所需要的能量、容量下降的補(bǔ)償、插電式混合動(dòng)力汽車的CS緩沖區(qū)(純電動(dòng)沒有這段)。
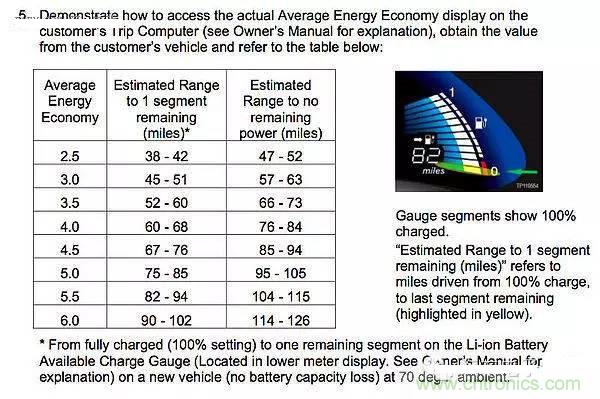
我們所說的能量管理,是嚴(yán)格使用以上的能量區(qū)隔,給消費(fèi)者一個(gè)比較均一化的體驗(yàn)。以下圖為例,是全分隔,把SOC直接對(duì)應(yīng)一個(gè)里程。續(xù)航里程和SOC密切相關(guān),SOC不等于實(shí)際續(xù)航里程。SOC從100%到50%一定比SOC從50%到0跑的路程長(zhǎng)。因?yàn)镾OC越少,電池能量消耗越快。
續(xù)航里程其實(shí)是一個(gè)很有意思的事情,因?yàn)楸旧砭褪且粋€(gè)復(fù)雜的函數(shù),用P-diagram來表達(dá)的話,大概如下:
可控部分主要是SOC、功率限值和溫度管控的算法;擾動(dòng)部分主要是車輛參數(shù)、道路環(huán)境(工況),駕駛員的駕駛習(xí)慣和SOC的估算誤差。
還有一部分沒寫:比如夏季和冬季系統(tǒng)性的差異,包括HVAC的功率對(duì)整個(gè)能量的使用。

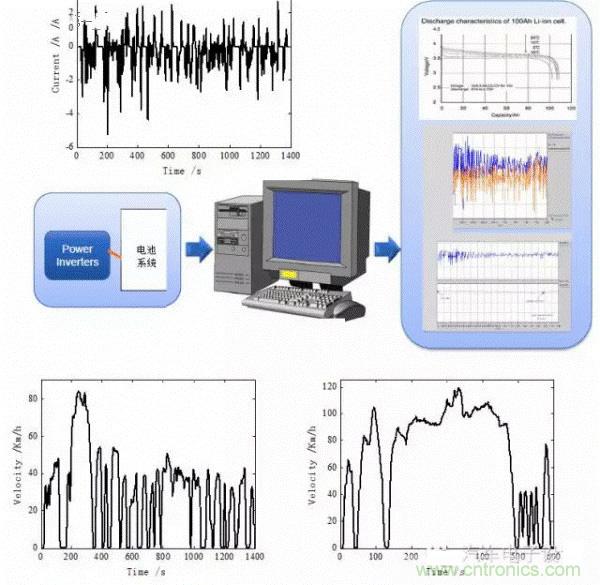
以下的數(shù)據(jù)是一個(gè)實(shí)測(cè)的例子,展示出來是一個(gè)變動(dòng)的情況。

溫度的差異太巨大了

BMS中SOC的估算精度,對(duì)車輛的續(xù)航里程影響很大,特別是純電動(dòng)汽車,估算精度差異越大,越容易讓用戶感受到里程焦慮;如果出現(xiàn)系統(tǒng)性的計(jì)算差錯(cuò)導(dǎo)致用戶沒電推車回家或者叫個(gè)牽引拖車,這事就大了。
二、SOC精度
DVP需要對(duì)BMS從SOC100%到不可用范圍(5%)都要進(jìn)行對(duì)比,在工況下,通過采集實(shí)際的電池工況之后,通過實(shí)驗(yàn)臺(tái)架來進(jìn)行對(duì)比,模型糾錯(cuò)(核算Ah和功率限值)等。
說點(diǎn)個(gè)人看法,所有的東西,都是在一定工況、溫度和使用條件下的精度,要求越高的系統(tǒng),對(duì)外圍的延伸的控制內(nèi)容也就越多,所以BMS的算法就越需要直接和VCU進(jìn)行聯(lián)系,獲取控制HVAC系統(tǒng)、控制驅(qū)動(dòng)系統(tǒng)和負(fù)載系統(tǒng)的權(quán)限。林健博士強(qiáng)調(diào)的OCV與SOC的關(guān)系,在LFP體系下不大好用。實(shí)際測(cè)試出來的大概是一個(gè)精度表格,籠統(tǒng)的講有些難度。
簡(jiǎn)單來說,BMS的精度做高一些,可以開出多一些窗口,不過也就是5%的區(qū)別。由于外部的原因造成的續(xù)航里程的差異,比這個(gè)來的大,所以SOC的精度多少是個(gè)合理值,值得我們思量。管理客戶期望很重要,只能報(bào)少一些,不能報(bào)多一些,所以現(xiàn)階段小電池的純電動(dòng)汽車使用體驗(yàn)很糟糕,也是大家拼命往50度以上湊的主要原因。



